
In this article we look at a digital geomagnetic sensor – this time its the BMM150 and as usual we will connect this to a Wemos Mini
Lets look at the manufacturers blurb about this sensor
Description
BMM150 is a low power and low noise 3-axis digital geomagnetic sensor to be used in compass applications. The 12-pin wafer level chip scale package (WLCSP) with a footprint of 1.56 x 1.56 mm² and 0.60 mm height provides highest design flexibility to the developer of mobile devices.
Applications like virtual reality or gaming on mobile devices such as mobile phones, tablet PCs or portable media players require 9-axis inertial sensing including magnetic heading information. Due to the stable performance over a large temperature range, the BMM150 is also especially suited for supporting drones in accurate heading.
BMM150 can be used with an inertial measurement unit (IMU) consisting of a 3-axis accelerometer and a 3-axis gyroscope like Bosch Sensortec’s BMI055.
Features
| Parameter | Technical data |
|---|---|
| Package | CSWLP- (12 pin) 1.56×1.56×0.6 mm³ 0.4 mm diagonal ball pitch |
| Temperature range | -40°C … +85°C |
| Digital interfaces | I²C and SPI (2 interrupt pins) |
| Resolution | 0.3μT |
| Supply voltage | VDD: 1.62V to 3.6V VDDIO: 1.2V to 3.6V |
| Zero-B offset | ±50μT |
| Non-linearity | <1% FS |
| Magnetic range typ. | ±1300μT (x,y-axis) ±2500μT (z-axis) |
| Average current consumption | 170 μA (low power preset) 500 μA (normal mode) |
| Interrupts | New data, magnetic threshold high / low |
Parts List
Here are the parts I used
| Name | Links | |
| Wemos Mini | ||
| BMM150 | ||
| Connecting cables |
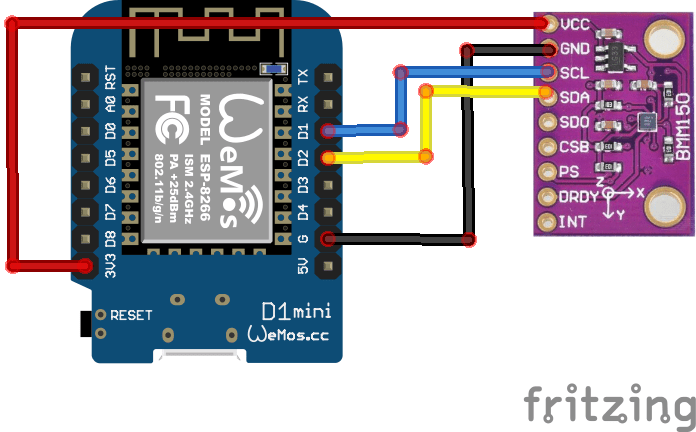
Schematic/Connection
Nothing complex here, just remember to use 3.3v
Code Example
This uses the library from https://github.com/Seeed-Studio/Grove_3_Axis_Compass_V2.0_BMM150
This is the default example which worked just fine
#include <Arduino.h>
#include <Wire.h>
// libraries
#include "bmm150.h"
#include "bmm150_defs.h"
BMM150 bmm = BMM150();
void setup()
{
Serial.begin(9600);
if(bmm.initialize() == BMM150_E_ID_NOT_CONFORM)
{
Serial.println("Chip ID can not read!");
while(1);
}
else
{
Serial.println("Initialize done!");
}
}
void loop()
{
bmm150_mag_data value;
bmm.read_mag_data();
value.x = bmm.raw_mag_data.raw_datax;
value.y = bmm.raw_mag_data.raw_datay;
value.z = bmm.raw_mag_data.raw_dataz;
float xyHeading = atan2(value.x, value.y);
float zxHeading = atan2(value.z, value.x);
float heading = xyHeading;
if(heading < 0)
heading += 2*PI;
if(heading > 2*PI)
heading -= 2*PI;
float headingDegrees = heading * 180/M_PI;
float xyHeadingDegrees = xyHeading * 180 / M_PI;
float zxHeadingDegrees = zxHeading * 180 / M_PI;
Serial.print("Heading: ");
Serial.println(headingDegrees);
delay(100);
}
Output
Open the serial monitor and you should see something like this – I was moving the module around. If you tie this up with an LCD you could make a digital compass – in fact that sounds a good idea for another article
Heading: 60.49
Heading: 56.58
Heading: 53.62
Heading: 37.93
Heading: 37.98
Heading: 38.95
Heading: 39.45
Heading: 42.31
Heading: 36.98
Heading: 18.60
Heading: 10.92
Heading: 355.60
Heading: 348.37
Heading: 351.50
Heading: 352.01
Heading: 29.29
Heading: 64.44
Links
https://ae-bst.resource.bosch.com/media/_tech/media/datasheets/BST-BMM150-DS001.pdf
https://github.com/BoschSensortec/BMM150-Sensor-API

{kind=link}